Goals of the project
The Yale Undergraduate Rover Association is building a functioning rover to compete in the 2015 University Rover Challenge (URC) hosted by the Mars Society in Hankesville, Utah. The team is in its second year of competition, meaning that much of the year has been spent the improving the design of the rover sent last year’s competition.
Nature of the Collaboration
YURA is divided into four subteams, each focusing on a unique aspect of the rover. The Electrical Team, headed by Philip Piper configures the electronics of the rover, making sure that all components have the proper amount of power. The Mechanical Team focuses on the physical design of the rover; Pat Wilczynski and his team spend their workshop hours drafting designs on SolidWorks and assembling the rover’s wheels, chassis, arm, suspension. Adit Sinha and his Software team set up communications with the rover, allowing a pilot to control it wirelessly. The Earth Science Team, headed by Alex Goss, spends workshop time equipping the rover to take and analyze soil samples. In addition to working individually, all of the teams work together to tackle goals important to the team as a whole.
Skills
A unique aspect of YURA is the diversity of the students involved. While there are many groups that specialize in engineering or programming, the rover project requires the help of individuals from multiple academic areas. Typical jobs for members include working with SolidWorks, using 3D printers, using shop tools, performing scientific research, designing circuits, and writing code.
Tools
The team uses a multitude of tools and equipment each week. Much of the rover was designed on SolidWorks with parts being machined on a mill, CNC router, or water jet. Additionally, some metal pieces were cut with a laser cutter. From there, team members assembled the rover using the workshop space of the Yale Center for Engineering and Innovative Design (CEID). Our code was developed in Python for use with a Beagle Bone Black microcontroller.
Process
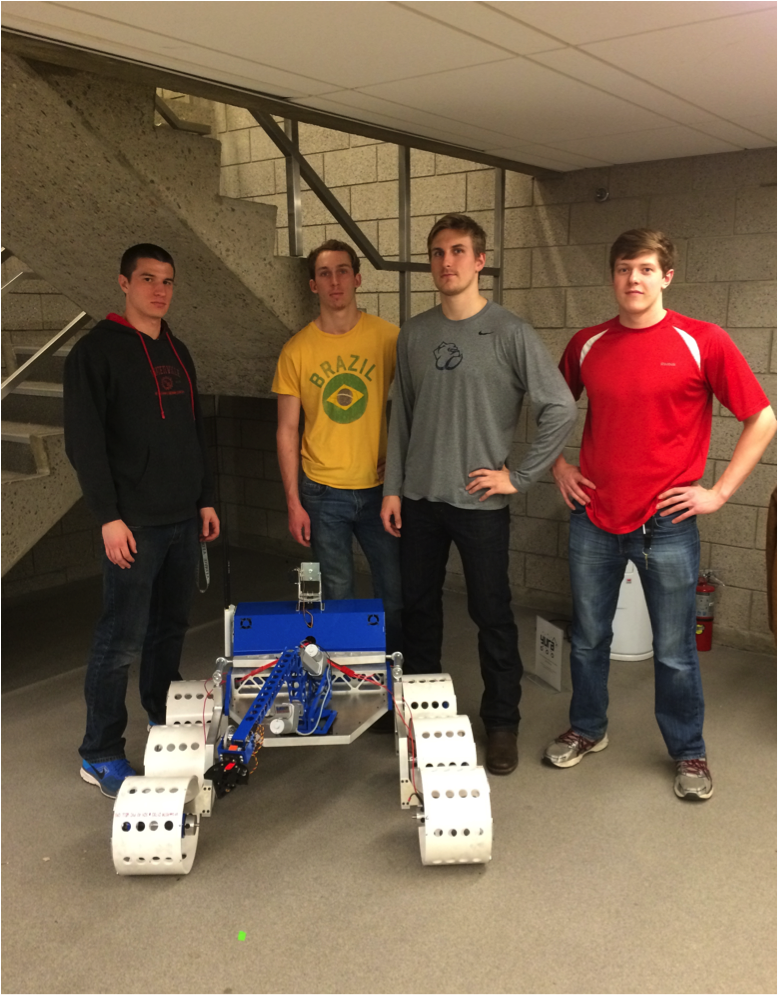
YURA was originally the brain child of then Freshmen Brian Clark and Ashton Wackym. After learning of the URC, they put together a team in the fall of 2013 to build a rover to compete in the 2014 competition. The team secured a 14th place finish out of over 30 teams from across the globe and dives into the 2014-2015 academic year looking to improve its performance. Since then, the team has worked extensively to redesign and revamp the original YURA rover into a contender to win this year’s URC.
Milestones
Of particular importance to the team was the completion of the team’s first rover and its placing at the 2014 URC. In addition to this, the team has already been selected to attend this year’s competition, an invitation only granted to 22 teams. The project has run much more smoothly than the past year with the body of the rover completed, and a finished rover just days away.
Challenges encountered
Much of the initial difficulties President Brian Clark faced involved establishing a foothold for his organization. With so many other clubs at Yale and other universities, it was very difficult in the beginning to convince students and sponsors that a functioning rover a functioning rover could be built in less than a year. As a result, much of the leadership and culture of the team has changed over the past two years. The result has been positive, and with Clark’s enthusiasm, an idea has turned into a reality.
Major outcomes
As stated before, YURA built a fully-functional rover and claimed 14th place at last year’s University Rover Competition.
Innovations, impact and successes
In designing a rover, YURA hopes to not only achieve individual success but also experiment with designs that could potentially be used on actual space rovers.
 Brian Clark
Brian Clark