Goals of the project
Firefighting can seem easy for a human, but making a robot into a firefighter is no easy task! The Blue Panther project goal was to develop an autonomous robot to navigate a model house, seek out a flame, and extinguish it using CO2.
This challenge was introduced through the annual Trinity College Home Robot Firefighting Competition, where the robot would be competing. It was anticipated to have great learning outcomes for members of the team, as success would involve lots of lots of programming, problem solving, teamwork, and leadership.
The project’s hope is that such robots may be useful when installed in homes someday, for they could then respond faster than the local fire department, and they could minimize the human risk involved in firefighting.
Nature of the Collaboration
While the workload of the project was divided, we would meet regularly to check our progress and find out how to help one another when we ran into problems.
Skills
Coding was done in C++ to implement various features of our robot, such as flame
Hardware designing, such as that of our battery power system, was done in PSpice for circuit simulation/CAD.
Tools
For software development: Arduino, C++
For hardware development: Circuit simulation software (PSpice), breadboard, soldering toolkit
For mechanical design: drilling, sawing, milling, lathing
Process
The very first meeting was to generate a vision for the project and a blueprint for our design. We divided up the work, and would test one other’s systems by trying to make them fail. If the design did not pass it went back to the drawing board.
Milestones
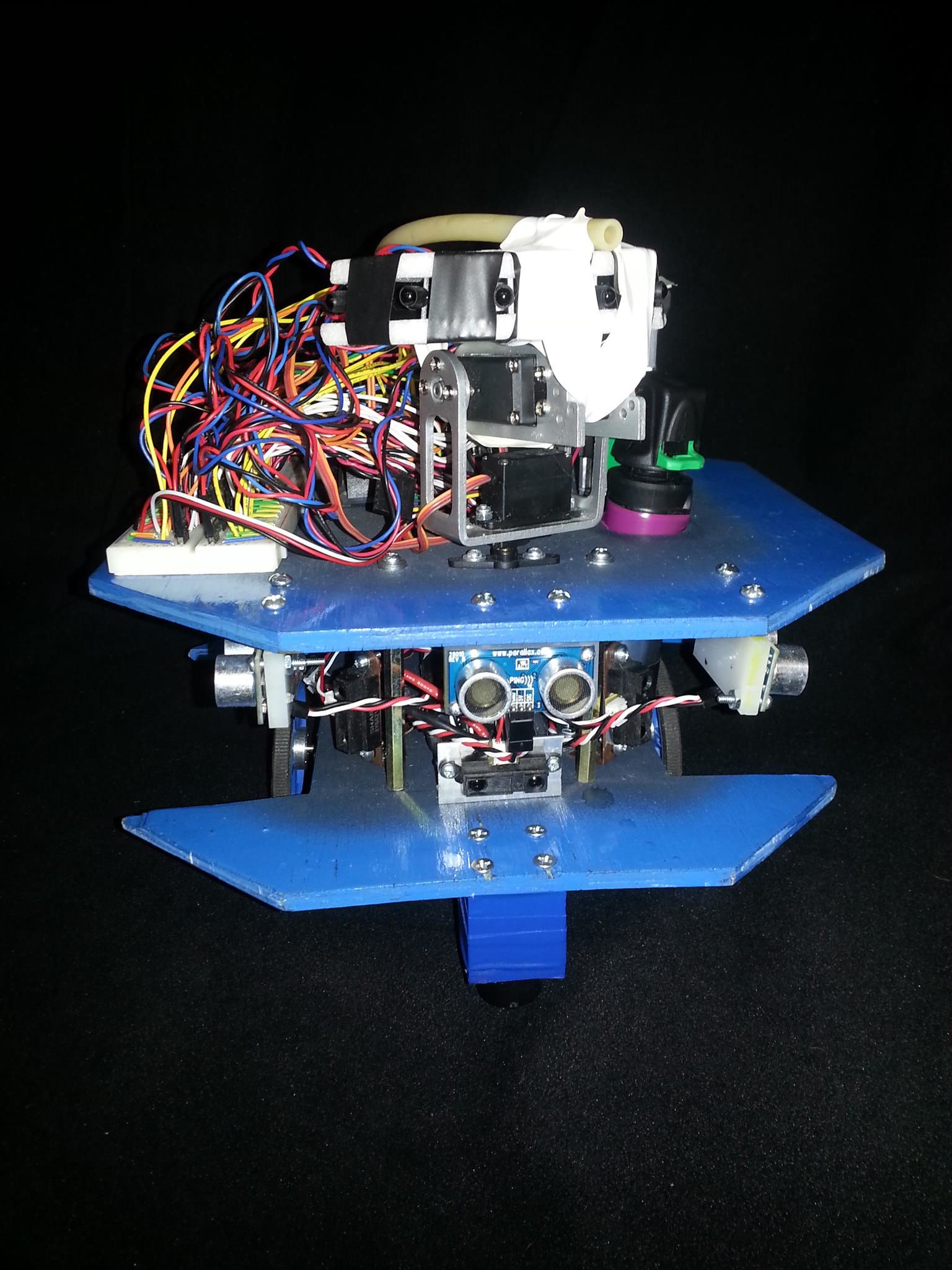
The major milestones were developing each functioning subsystem, such as flame detection, extinguishing, dynamic motor control, autonomous navigation, battery power system, and the robot chassis. We made a large prototype to help with early development, and then built a second, smaller prototype once systems were integrated to form our firefighting robot.
Challenges encountered
We faced many challenges. The biggest were:
- Navigating the home – which was solved using wall following with sonars
- Precisely controlling the robot’s wheel speed and position – which was solved using PD motor control
- Avoiding a simulated pet in a hallway – which was solved using IR proximity sensors
- Detecting and extinguishing the flame – which was solved using IR thermal sensors and pressurized CO2
Major outcomes
The project yielded many learning outcomes, including programming, problem solving, teamwork, and even leadership. Between 2012 and 2014, participation in the project grew from 1 to 15 students.
Innovations, impact and successes
Won first place out of 83 teams at the international 2014 Trinity Firefighting Home Robot Competition, and demonstrated robot to hundreds of prospective students.
 Chitula Chipimo
Chitula Chipimo